以下是科研实习第三周的进度
psc-config/psc 代码学习
论文学习
psc-config/psc 的论文以The Plasma Simulation Code: A modern particle-in-cell code with patch-based load-balancing为题发表在Journal of Computational Physics上,为了更好的理解psc-config/psc的代码,翻阅一下论文。
论文第四章中讲述了psc-config/psc中的并行策略,但是由于并行策略是关于粒子系统网格化的详细讨论,对于当前项目没有特别大的意义,但是其中的负载均衡策略是值得学习的。
负载均衡:用于在多个服务器或资源之间分配工作负载,以确保系统的高可用性和高性能。其主要目标是优化资源使用、最大化吞吐量、最小化响应时间,并避免某个单一资源过载。
论文指出:给定一定数量的处理单元N_proc,将域划分成比处理单元数量更多的补丁N_patch,每个处理单元处理多个补丁(通常10-100个)。通过动态调整补丁到处理单元的分配,我们可以确保每个处理单元被分配到几乎相等的负载。
demo:
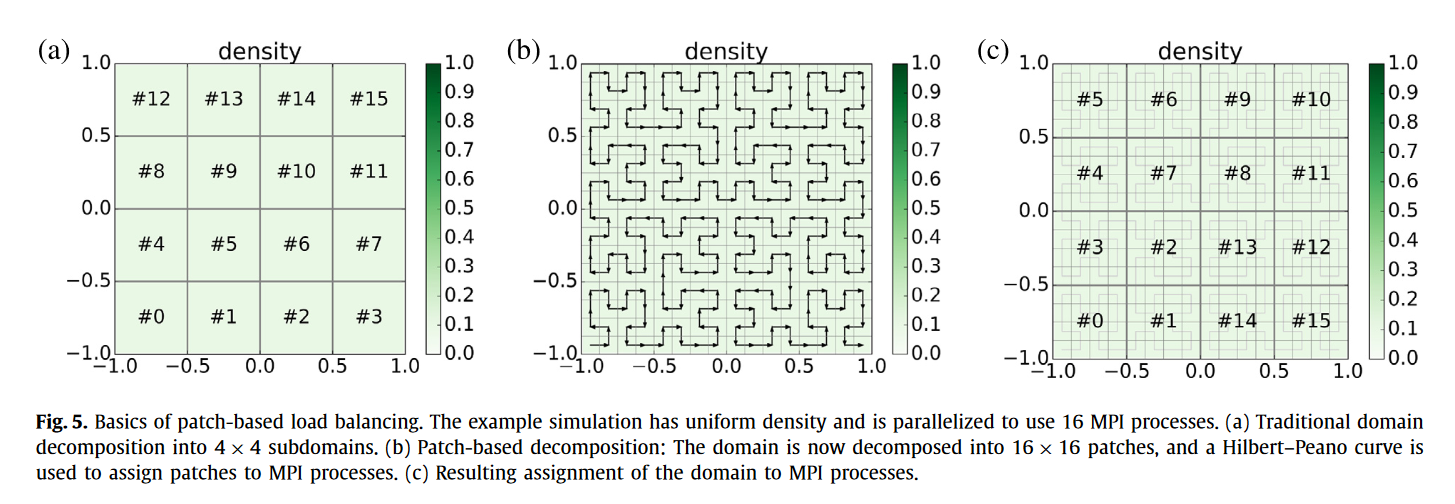
我们将域划分为16×16个子域,如图所示。由于现在Patch(256个)远多于进程(16个),每个进程需要处理多个Patch,因此需要定义一个将Patch分配给进程的策略。图(b)中沿着1维曲线,每个Patch被访问一次。然后将这条256个Patch的曲线划分成与进程数量相同的段,在这种情况下我们得到16个每个包含16个Patch的段。然后将这些Patch段依次分配给每个MPI进程。最终(见图(c)),得到的空间分解与使用4×4子域的标准分区方式基本相同,但获得了额外的灵活性,可以通过将Patch从负载较高的进程移动到负载较低的相邻进程来应对负载变化。
简单说就是进一步拆分一个进程中的处理,使一个进程中的处理离散化,从而可以使一个进程中的运行项可以成比例的产生负载,每个进程的Patch可以伪动态进行分配。
代码学习-变量/方法名的统一性
#ifdef USE_CUDA
using PscConfig = PscConfig1vbecCuda<Dim>;
#else
using PscConfig = PscConfig1vbecDouble<Dim>;
#endif
在主程序中,我们会引用不同的变量,对于同一个功能不同设备的变量,尽可能保证两个设备上的变量的成员变量具有一定的统一性,这样我们完全可以 使用同一个变量来指代不同设备上的配置。
同样,我们可以在不同的头文件中定义同一个方法,具有相同的参数、返回值,然后引入的头文件不同,实现不同位置的计算:
代码学习-使用类对底层进行封装
使用类进行封装,使其在主要代码中不可知底层实现(同样以上周的为例),我们在后面的引用中,只使用Psc这个类(C++的结构体和类已经泛化,下统称类), 使用C++模板语法,传入的PscConfig可以根据需求使用不同设备的PscConfig(不同设备的PscConfigXXXX均继承PscConfig类)
template <typename PscConfig, typename Diagnostics, typename InjectParticles>
struct Psc
{
using Mparticles = typename PscConfig::Mparticles;
using MfieldsState = typename PscConfig::MfieldsState;
using Balance = typename PscConfig::Balance;
using Sort = typename PscConfig::Sort;
using Collision = typename PscConfig::Collision;
using Checks = typename PscConfig::Checks;
using Marder = typename PscConfig::Marder;
using PushParticles = typename PscConfig::PushParticles;
using PushFields = typename PscConfig::PushFields;
using Bnd = typename PscConfig::Bnd;
using BndFields = typename PscConfig::BndFields;
using BndParticles = typename PscConfig::BndParticles;
using Dim = typename PscConfig::Dim;
//...省略
}
代码学习-CMAKE模板的使用
#ifndef PSCCONFIG_H_
#define PSCCONFIG_H_
/* PSC Version Information */
#define PSC_VERSION_MAJOR @PSC_VERSION_MAJOR@
#define PSC_VERSION_MINOR @PSC_VERSION_MINOR@
#define PSC_VERSION_PATCH @PSC_VERSION_PATCH@
#define PSC_VERSION @PSC_VERSION@
/*
* PSC Build Information:
*
* Compiler:
* C: @CMAKE_C_COMPILER@
* Id: @CMAKE_C_COMPILER_ID@ @CMAKE_C_COMPILER_VERSION@
* CXX: @CMAKE_CXX_COMPILER@
* Id: @CMAKE_CXX_COMPILER_ID@ @CMAKE_CXX_COMPILER_VERSION@
* Fortran: @CMAKE_CXX_COMPILER@
* Id: @CMAKE_Fortran_COMPILER_ID@ @CMAKE_CXX_COMPILER_VERSION@
*/
#cmakedefine USE_CUDA
#cmakedefine USE_VPIC
/* Everything past this line is programatically generated */
@PSC_CONFIG_DEFINES@
#endif /* PSCCONFIG_H_ */
使用Cmake模板,自动生成配置在CMakeLists.txt中的头文件,这里将cmake定义的环境变量引入了代码。
代码学习-rmm的使用
RAPIDS Memory Manager(rmm)可以轻松的将host上的内存转换到device上的显存,同时如无显卡则不变,是一个快速的内存管理系统。
psc-config/psc中大量使用了rmm来简化内存分配问题
static bool first_time = true;
if (!first_time)
return;
first_time = false;
#ifdef PSC_HAVE_RMM
rmm::logger().set_level(spdlog::level::trace);
device_mr_type* mr =
rmm::mr::get_current_device_resource(); // Points to `cuda_memory_resource`
static log_mr_type _log_mr{mr, std::cout, true};
static pool_mr_type pool_mr{&_log_mr, 15000000000};
static track_mr_type track_mr{&pool_mr};
#if 0
static log_mr_type log_mr{&track_mr, std::cout, true};
rmm::mr::set_current_device_resource(&log_mr);
代码实践
使用psc-config/psc类似的方法,求解二维方形边界上关于第一类边界条件的拉普拉斯方程。
文件结构:
gp-demo/
├── CMakeLists.txt
├── include
│ ├── laplace.cuh
│ └── laplace.h
└── src
├── CMakeLists.txt
├── laplace.cpp
├── laplace.cu
└── main.cpp
根据psc-config的思路,我们在CMakeLists.txt中指定环境变量
# ./CMakeLists.txt
cmake_minimum_required(VERSION 3.0)
project(gp_demo)
option(USE_CUDA "Build CUDA components" ON)
if (USE_CUDA)
enable_language(CUDA CXX)
else ()
enable_language(CXX)
endif()
set(CMAKE_CUDA_ARCHITECTURES all-major)
set(CMAKE_CUDA_STANDARD 17)
include_directories("./include")
add_subdirectory(./src)
# ./src/CMakeLists.txt
include_directories("/usr/local/cuda-11.8/targets/x86_64-linux/include")
if (USE_CUDA)
find_package(CUDA REQUIRED)
add_executable(gp-main main.cpp
laplace.cu)
set_target_properties(gp-main PROPERTIES
CUDA_SEPARABLE_COMPILATION ON)
else()
add_executable(gp-main main.cpp
laplace.cpp)
endif()
在C++代码中,我们使用psc-config/psc的方法
// ./src/main.cpp
#ifdef USE_CUDA
#include <laplace.cuh>
#else
#include <laplace.h>
#endif
然后我们采用不同文件下的同名方法
// ./include/laplace.h
#ifndef LAPLACE_H
#define LAPLACE_H
#define IDX(i, j, cols) ((i) * (cols) + (j))
void solveLaplace(double* grid, int rows, int cols, int max_iter = 10000, double tol = 1e-6);
#endif
// ./include/laplace.cuh
#ifndef LAPLACE_CUH
#define LAPLACE_CUH
#include <cuda_runtime.h>
#include <device_launch_parameters.h>
#define IDX(i, j, cols) ((i) * (cols) + (j))
__global__ void laplaceKernel(double* grid, double* new_grid, int rows, int cols);
void solveLaplace(double* grid, int rows, int cols, int max_iter = 10000, double tol = 1e-6);
#endif
对应不同的实现为:
// openmp
void solveLaplace(double* grid, int rows, int cols, int max_iter, double tol) {
double* new_grid = new double[rows * cols];
for (int iter = 0; iter < max_iter; ++iter) {
double max_error = 0.0;
#pragma omp parallel for reduction(max:max_error)
for (int i = 1; i < rows - 1; ++i) {
for (int j = 1; j < cols - 1; ++j) {
int idx = IDX(i, j, cols);
new_grid[idx] = 0.25 * (grid[IDX(i-1, j, cols)] + grid[IDX(i+1, j, cols)] + grid[IDX(i, j-1, cols)] + grid[IDX(i, j+1, cols)]);
double error = std::fabs(new_grid[idx] - grid[idx]);
max_error = std::max(max_error, error);
}
}
#pragma omp parallel for
for (int i = 1; i < rows - 1; ++i) {
for (int j = 1; j < cols - 1; ++j) {
grid[IDX(i, j, cols)] = new_grid[IDX(i, j, cols)];
}
}
if (max_error < tol) {
std::cout << "Converged after " << iter + 1 << " iterations with error " << max_error << std::endl;
break;
}
}
delete[] new_grid;
}
// cuda
__global__ void laplaceKernel(double* grid, double* new_grid, int rows, int cols) {
int i = blockIdx.y * blockDim.y + threadIdx.y;
int j = blockIdx.x * blockDim.x + threadIdx.x;
if (i > 0 && i < rows - 1 && j > 0 && j < cols - 1) {
new_grid[IDX(i, j, cols)] = 0.25 * (grid[IDX(i-1, j, cols)] + grid[IDX(i+1, j, cols)]
+ grid[IDX(i, j-1, cols)] + grid[IDX(i, j+1, cols)]);
}
}
void solveLaplace(double* grid, int rows, int cols, int max_iter, double tol) {
double *d_grid, *d_new_grid;
cudaMalloc(&d_grid, rows * cols * sizeof(double));
cudaMalloc(&d_new_grid, rows * cols * sizeof(double));
cudaMemcpy(d_grid, grid, rows * cols * sizeof(double), cudaMemcpyHostToDevice);
//这里我指定了大小
dim3 blockSize(10, 10);
dim3 gridSize(10,10);
for (int iter = 0; iter < max_iter; ++iter) {
laplaceKernel<<<gridSize, blockSize>>>(d_grid, d_new_grid, rows, cols);
cudaDeviceSynchronize();
cudaMemcpy(grid, d_new_grid, rows * cols * sizeof(double), cudaMemcpyDeviceToHost);
double max_error = 0.0;
for (int i = 1; i < rows - 1; ++i) {
for (int j = 1; j < cols - 1; ++j) {
double error = std::fabs(grid[IDX(i, j, cols)] - d_grid[IDX(i, j, cols)]);
if (error > max_error) {
max_error = error;
}
}
}
if (max_error < tol) {
std::cout << "Converged after " << iter + 1 << " iterations with error " << max_error << std::endl;
break;
}
std::swap(d_grid, d_new_grid);
}
cudaMemcpy(grid, d_grid, rows * cols * sizeof(double), cudaMemcpyDeviceToHost);
cudaFree(d_grid);
cudaFree(d_new_grid);
}
主函数信息:
int main() {
int rows = 100;
int cols = 100;
double* grid = new double[rows * cols];
for (int i = 0; i < rows; ++i) {
for (int j = 0; j < cols; ++j) {
grid[IDX(i, j, cols)] = 0.0;
}
}
for (int i = 0; i < rows; ++i) {
grid[IDX(i, 0, cols)] = 0.0; // 左边界条件
grid[IDX(i, cols-1, cols)] = 1.0; // 右边界条件
}
for (int j = 0; j < cols; ++j) {
grid[IDX(0, j, cols)] = 0.0; // 上边界条件
grid[IDX(rows-1, j, cols)] = 1.0; // 下边界条件
}
solveLaplace(grid, rows, cols);
for (int i = 0; i < rows; ++i) {
for (int j = 0; j < cols; ++j) {
std::cout << grid[IDX(i, j, cols)] << " ";
}
std::cout << std::endl;
}
delete[] grid;
return 0;
}